Robotic Wrist Module
An ongoing research and fabrication project at Bergen Community College's STEM Center. The goal is to design a compact wrist module with full flexion/extension, radial/ulnar deviation, and pronation/supination — matching the full kinematic range of the human wrist.
Key Highlights
- ✦Full 3-DOF wrist kinematics (flexion/extension, deviation, pronation)
- ✦Servo alternative research for optimized torque-to-weight ratio
- ✦Battery component analysis for power efficiency
- ✦Onshape CAD modeling with iterative prototype testing
- ✦Collaboration with BCC faculty and research team
Project Info
Role
Research Volunteer · Mechanical Designer
Timeline
Sept 2025 — Present
Project Background
The BCC STEM Research Center's Robotic Arm Project aims to produce a biomimetic arm capable of replicating human dexterity. The wrist module is a critical subassembly — it must transmit force from the forearm to the hand while allowing multi-axis rotation without losing structural integrity.
Design Goals
The module must replicate three independent axes of wrist motion: flexion/extension (palm up/down), radial/ulnar deviation (side to side), and pronation/supination (rotation). All three must operate simultaneously and independently, controlled by lightweight servo actuators within a compact envelope.
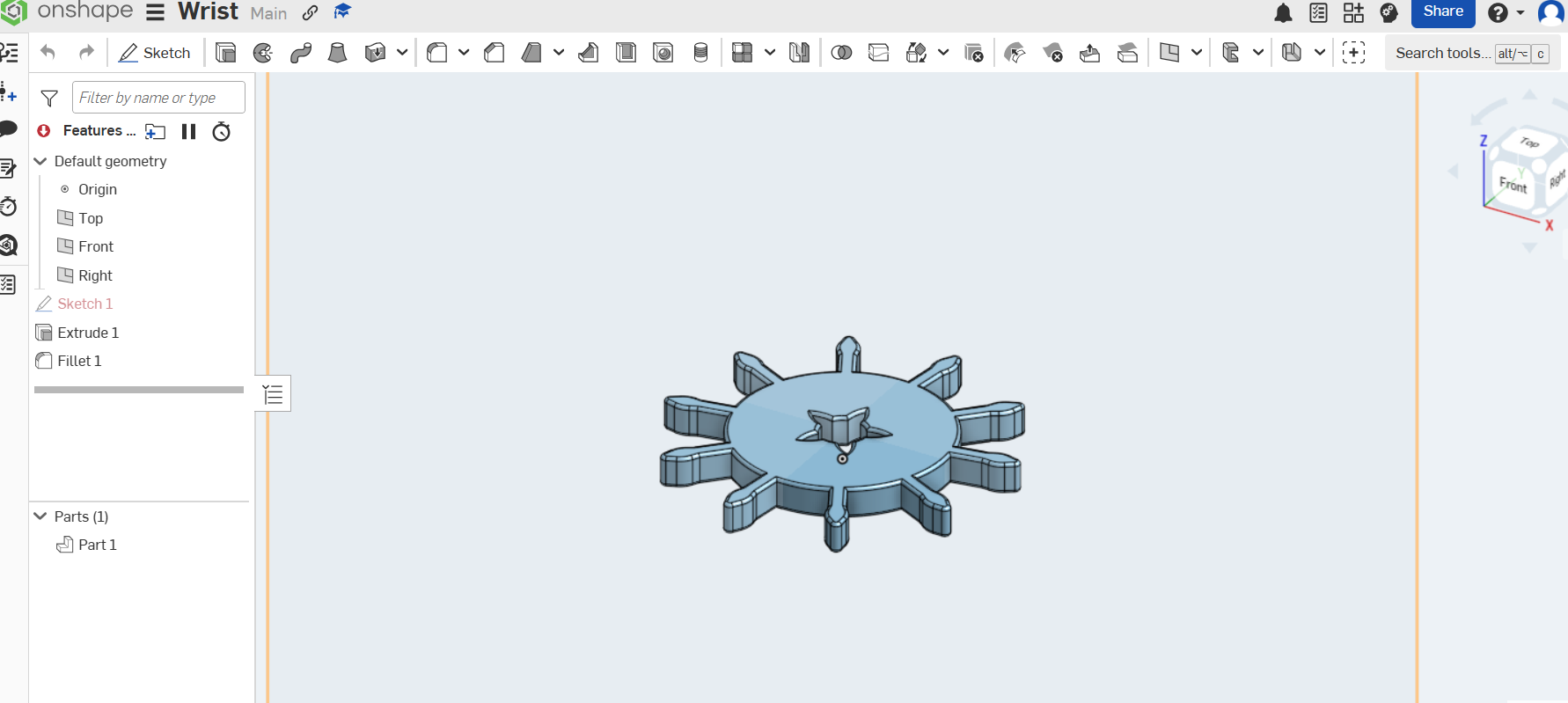
Current Progress
Initial CAD models have been produced in Onshape, with the first physical prototypes in fabrication. Servo selection is being evaluated against torque requirements at full extension load. Battery research has identified candidate lithium polymer configurations that meet runtime targets without exceeding the arm's weight budget.
Next Steps
Complete manufacturing of the first fully-assembled wrist prototype, conduct range-of-motion testing across all three axes, and document results for the research team. Integration with the elbow subassembly is planned once the wrist module passes load validation.
Project Gallery
1 images